
Coordonate şi sisteme de referinţă
Pagina 1 din 1

Coordonate şi sisteme de referinţă
Scris de Rami Dum Feb 03, 2013 12:15 pm
Sisteme de coordonate
În fizică, pentru a descrie diverse fenomene, este esenţial să cunoaştem locul unde acestea se petrec, respectiv poziţia lor în spaţiu, pentru a putea descrie evoluţia lor ulterioară. Pentru asta avem nevoie de repere. Metoda prin care sunt introduse aceste repere este definirea unui sistem de coordonate, astfel încât, faţă de acesta, să putem determina poziţia unui punct material la un moment dat.Punctul material reprezintă în fizică un obiect ale cărui dimensiuni pot fi neglijate şi care poate fi caracterizat şi prin alte proprietăţi, în funcţie de fenomenul analizat (masă, sarcină, etc). Capitolul fizicii care studiază mişcarea punctului material se numeşte cinematică. Pentru studiul unor mişcări mai complexe, în care dimensiunile corpului nu mai pot fi neglijate se foloseşte sistemul de puncte materiale (un număr de puncte materiale ce aparţin unui volum).
Sistemele de coordonate folosite pentru a descrie poziţia unui punct material sunt: sistemul de coordonate cartezian şi sistemul de cordonate polar.
Pentru două dimensiuni, sistemul de coordonate cartezian este reprezentat de două axe ortogonale, iar poziţia unui punct material în raport cu acestea este descris de coordonatele pe cele două axe,
Sistemul de coordonate polar descrie poziţia punctului material printr-un segment de dreaptă ce reprezintă distanţa de la punct la originea axelor şi unghiul descris de acel segment cu una dintre axe
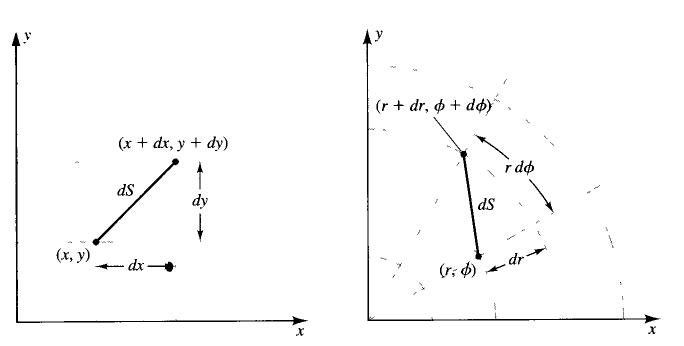
Punctele apropiate au valori ale coordonatelor apropiate. Într-un sistem cartezian punctele
Similar, pentru un sistem de coordonate polare:
Aşadar, distanţa între două puncte poate fi exprimată sub forma:
- în coordonate carteziene:
- în coordonate polare:
Această ultimă relaţie poate fi aproximată doar pentru

Rami- Experienced User

- Mesaje : 498
Puncte : 648
Data de inscriere : 01/10/2012
![]()
Re: Coordonate şi sisteme de referinţă
Scris de Rami Lun Feb 04, 2013 3:28 am
Echivalenţa sistemelor de coordonate
Poziţia unui punct material faţă de un sistem de coordonate poate fi la fel de bine descrisă prin celălalt sistem de coordonate. Asta înseamnă că sistemul de coordonate cartezian şi cel polar sunt echivalente. Trecerea de la un sistem la altul se numeşte transformarea coordonatelor.
În acest caz vom avea:
şi
Introducând
Aşadar, distanţa dintre puncte alăturate
Sisteme de referinţă inerţiale
Conform primului principiu al lui Newton, o particulă se află în repaus relativ sau în mişcare rectilinie uniformă, atâta timp cât asupra sa nu acţionează alte forţe care să-i schimbe această stare de mişcare.Când spunem că se deplasează rectiliniu şi uniform, spunem că se deplasează în linie dreaptă şi cu viteză constantă. Linia dreaptă reprezintă cea mai mică distanţă dintre două puncte aflate într-un spaţiu tridimensional Euclidian. Geometria acestui spaţiu este definită în coordonate carteziene astfel:
unde
Pentru a descrie mişcarea unui punct material (pe care îl vom denumi în continuare particulă) în acest spaţiu tridimensional, în conformitate cu legile mecanicii Newtoniene, este suficient să raportăm poziţia sa la sistemul cartezian de coordonate
Spunem că acest sistem reprezintă un sistem de referinţă.
Să ne imaginăm o particulă ce se află în originea O al acestui sistem de referinţă. După ce particula se deplasează cu viteză constantă în raport cu axele
Acest nou sistem de referinţă este un sistem de referinţă inerţial.
De aici putem desprinde următoarele concluzii generale:
- un sistem de referinţă reprezintă un set de coordonate faţă de care putem raporta poziţia unei particule;
- spunem că sistemul de referinţă este ataşat unei particule (sau obiect) atunci când particula se află tot timpul în originea sistemului de coordonate;
- sistemul de referinţă inerţial este un sistem de referinţă aflat în mişcare cu viteză constantă (sau în repaus relativ) faţă de un alt sistem de referinţă şi în care se respectă primul principiu al lui Newton.
Legile mecanicii Newtoniene se aplică sub cea mai simplă formă a lor în sistemele de referinţă inerţiale. Un observator aflat în acest sistem de referinţă inerţial (SRI) va descoperi un parametru, numit timp, în raport cu care schimbările de poziţie ale unei particule au loc la o rată constantă. Practic, mişcarea unei particule poate fi descrisă raportând coordonatele sale în funcţie de timp,
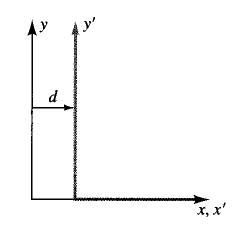
Având două seturi de cordonate carteziene
Translaţia pe distanţa
Rotaţia cu un unghi

Mişcarea uniformă cu viteza
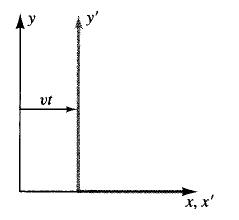
Prezumţia lui Newton era că dacă două evenimente sunt simultane într-un sistem de referinţă, ele sunt simultane în toate sistemele de referinţă. Vom vedea, probabil în altă expunere, că totuşi lucrurile nu stau chiar aşa, conform teoriei lui Einstein. Însă, conform mecanicii Newtoniene, timpul era universal, pentru orice sistem de referinţă.
Astfel legea de mişcare în raport cu timpul, pentru două sisteme de referinţă inerţiale ce se deplasează cu viteza
Relaţiile de mai sus poartă numele de transformările lui Galilei.
Ar mai fi de precizat că: o particulă căreia i se ataşează un sistem de referinţă se află în repaus în raport cu propriul său sistem de referinţă!
Astfel putem vedea de ce este impropriu să încercăm să ataşăm sistem de referinţă unui foton: cum un foton se deplasează întotdeuna cu viteza luminii faţă de orice sistem de referinţă, ataşându-i propriul sistem de referinţă ar însemna ca faţă de acesta să fie în repaus; ori, nu poate fi simultan şi în repaus şi în mişcare faţă de acelaşi sistem de referinţă, deci rezultă o contradicţie.
Dar despre astea, mai pe larg, poate într-un alt topic.
Rami- Experienced User
- Mesaje : 498
Puncte : 648
Data de inscriere : 01/10/2012
![]()
![]()
» Sisteme de alarmă în caz de cutremur
» Neclarităţi despre coordonate şi dimensiuni.
» Dependenţa energiei de sistemul de referinţă
» Neclarităţi despre coordonate şi dimensiuni.
» Dependenţa energiei de sistemul de referinţă
Pagina 1 din 1
Permisiunile acestui forum:
Nu puteti raspunde la subiectele acestui forum|
|
|
 Tehnocultura
Tehnocultura